ロボットの手『ロボットハンド』の設計とは?
ロボットが物を落とさずに目的地に運ぶための重要なコンポーネントが、ロボットの「手」に相当するロボットハンドです。その設計はロボットシステム全体の品質や性能、さらには工場や倉庫のラインの生産性や収益性にまで大きく影響を与えます。
しかし、ロボットハンドの設計・開発は、複雑かつ繊細です。把持する対象物の形状や状態、輸送中に対象物を損傷しない把持方法など、多くの点を考慮する必要があります。さらには、ロボットからの制御命令を適切に反映し、対象物を安定的に把持することが常に求められます。これらの仕様を満たし、様々なケースに対応可能なロボットハンドの設計には、優秀な設計チームが必要となってきます。
Mujinが取り組む『ロボットハンド』開発とは?
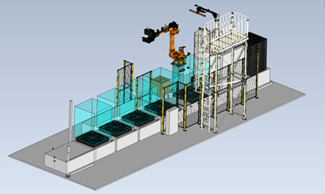
ロボットハンドの設計・開発を担うのが、Mujinのデザインチームです。チームはロボットハンド単体だけでなく、付随する設備、システムレイアウト設計、機器選定、それらを統合した新しいシステムの考案まで担当しています。通常の設備開発では製図後、すぐに実機でプロトタイプを製作するのに対し、 Mujinでは Machine Intelligence(機械知能)という自社技術を活用し、実機の製作の前に、デジタルツイン上に3Dモデルで各種設備のプロトタイプを生成しタスクの実現可能性や性能等を検証してから、製作に移ることで、開発スピードと製品品質向上の両立に繋げています。
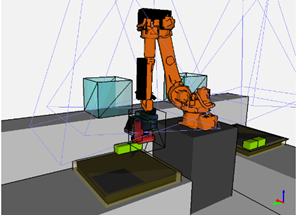
自動化ラインに用いられるロボットハンドの開発では、掴む対象物の寸法、重量、強度、環境条件などの多くの要因を考慮する必要があります。ロボットのピッキング位置、ピックアップの最適なタイミング、対象物への到達までのリスク、異なる形状の対象物の拾い損ね等の可能性を徹底的に検証しています。上記の一連の工程をデジタルツインと実環境を組み合わせ、検証することで、通常より速いスピードで新規のプロダクト開発を支えています。
お客様の課題を日々解決し続けるMujinの『新型ロボットハンド』の完成まで
Mujinは、今日までに多くの困難なプロジェクトを成し遂げてきました。近年では、品出しの効率化に配慮して、開けやすいミシン目付きの段ボールも流通しています。
あるプロジェクトでは、そのミシン目付きの段ボールをパレットへ積む必要がありました。しかし、既存のハンドだと、段ボールを壊さないようにゆっくり搬送しなければならず、現場で要求されているスピードを達成できないことが分かりました。
この課題を解決するため、Mujinのデザインチームは、ロボットハンドを一から設計し、壊れやすい箱を安定的に搬送できる「二面ハンド」を開発しました。このロボットハンドは、上部からの吸引を通じて対象物を持ち上げつつ、対象物の側面も接着することが特徴です。従来のロボットハンドと比較して、より確実な把持と高速移動を実現しています。この結果、破損しやすい段ボールでも、1時間あたり平均500箱の積み付けが可能となり、実際お客様の現場で活用されています。

デザインチームの今後の拡大
Mujinのデザインチームは、Mujinの開発において不可欠な役割を担っており、今後も難易度の高いプロジェクトに挑戦していきます。それらを成功させるために、ロボットシステム開発に情熱を持っている方を求めています。デザインチームでは、課題解決力や創造的な発想の求められる業務に取り組んでいただけます。設備設計、プログラミング、マテリアルハンドリング、ロボット工学、またはメカトロニクスの経験がある方にとっては、技術的にキャッチアップしやすい環境です。働いているメンバーをより詳しく知りたい場合、こちらの記事をご覧ください。デザインチームの業務にご興味をもっていただいた場合、当社の採用ページから応募をご検討ください。
注釈 *パレタイジング…梱包済みの荷物を一次的に保管するためのパレットに積載する作業 *パレット…工場、倉庫、コンテナ、トラックなどの荷物を載せる荷役台 *スループット…単位時間あたりに処理できる作業量(処理スピード)